El pasado martes 29 de Septiembre se realizó una nueva Charla de postgrado, correspondiente al segundo semestre en la modalidad online.

En esta ocasión los expositores fueron:
Relator: Ronald Coronado. Alumno de Doctorado, área Sistemas de Información, profesor supervisor Pablo Irarrázaval.
Titulo: Reducción de los efectos de fuera de resonancia (off-resonance) medinate descorrelación espacial en Magnetic Resonance Fingerprinting (MRF)
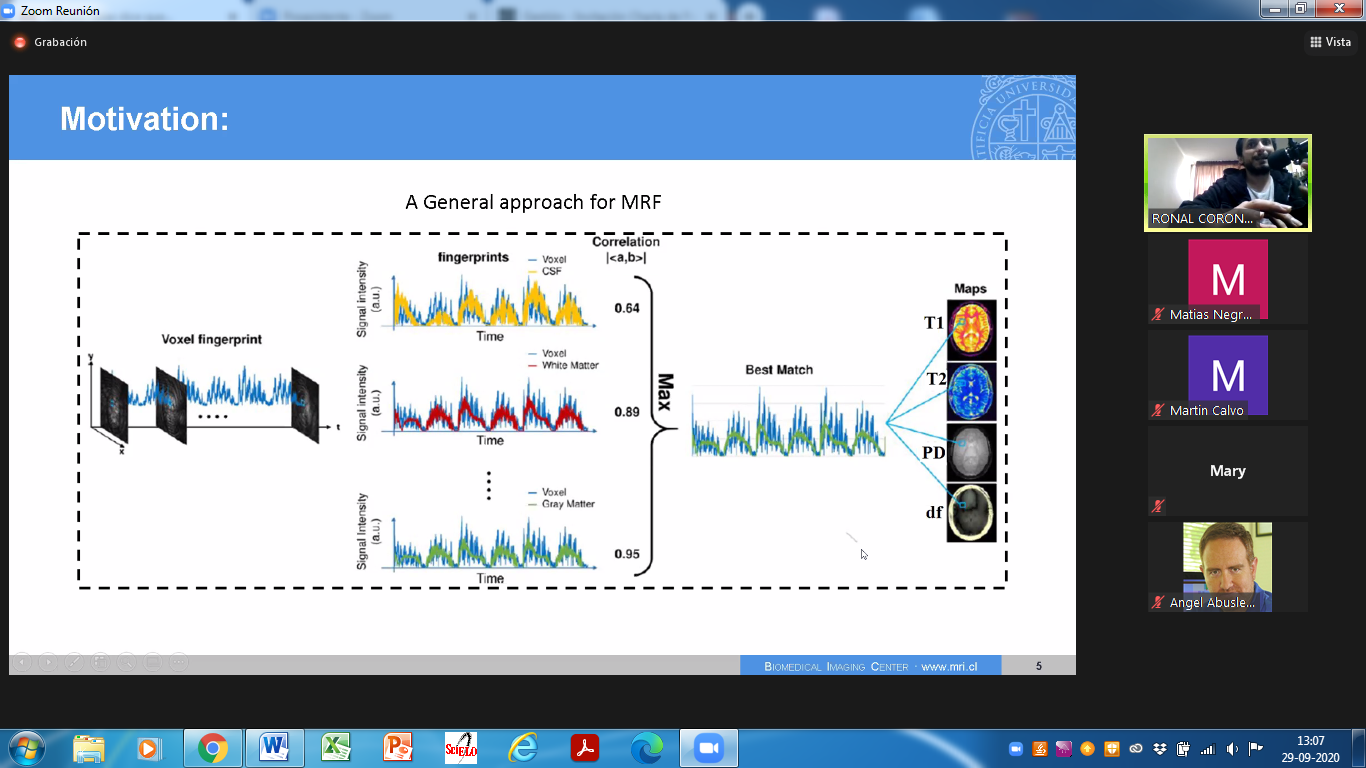
Resumen: Magnetic Resonance Fingerprinting (MRF) es una técnica relativamente nueva que permite cuantificar múltiples propiedades de tejidos en tiempos de adquisición eficientes. MRF puede hacer medidas cuantitativas reproducibles que permitirían hacer diagnósticos más objetivos sin importar la ubicación ni tiempo en que se realiza la adquisición. Además, permite realizar estudios individuales de patologías de pacientes mediante el seguimiento del desarrollo de los biomarcadores asociados a los tejidos afectados. MRF está basada en una secuencia balanced Steady State Free Precession (bSSFP), la cual es afectada por condiciones de fuera de resonancia (off-resonance) que se manifiesta como la aparición de bandas oscuras en sus imágenes. Además, MRF emplea una trayectoria espiral para la lectura de sus datos la cual es vulnerable a la presencia de off-resonance, produciendo borrosidades (blurring) en el dominio espacial de la imagen. Con este trabajo, espero mejorar la calidad de las imágenes de MRF, lo cual es importante ya que esta técnica se usa para cuantificación en una gran gama de tejidos de cuerpo, tales como: cerebro, corazón, abdomen, próstata, entre otros. Esto permite hacer estudios más precisos de las enfermedades sin limitarse a que tejido está en estudio, además de, permitir tiempos clínicos de adquisición razonables. Por lo que este trabajo contribuiría a la mejora de la calidad de imágenes médicas por resonancia, que son de gran importancia para en el diagnóstico y seguimiento de muchas enfermedades.
Relator: Martín Calvo. Magíster en Ciencias de la Ingeniería, área Automatización, Instrumentación y Robótica, profesor guía Miguel Torres.
Título: Estimación de Parámetros Inerciales En-línea Para Cargadores Robóticos.
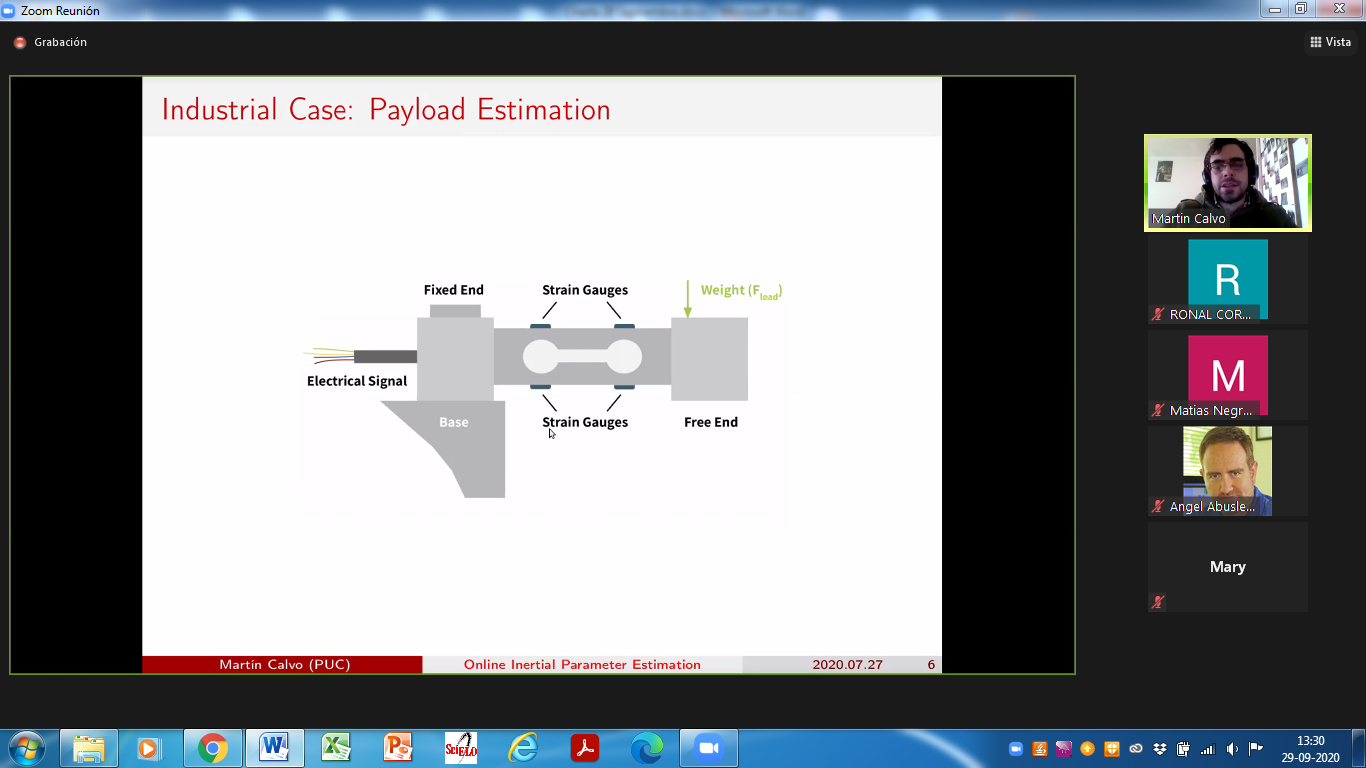
Resumen: La masa transportada, roce viscoso y centro de masa de cargadores y maquinarias movedoras de tierra son fundamentales para monitorear productividad, y otros aspectos como planificación de operaciones y mantenimiento. La masa de la carga se ha medido típicamente usando sensores de galga extensométrica. Sin embargo, estos sensores requieren frecuentes re-calibraciones debido a estrés mecánico y no entregan información sobre roce viscoso. Este trabajo presenta un método básado en un observador para estimar en línea la masa de un cargador, su inercia rotacional, centro de masa y coeficientes de roce viscoso usando mediciones de torque, velocidad y aceleración. Un aspecto novedoso es la introducción de un criterio de información mutua, para seleccionar datos que aseguren una identificación adecuada de los parámetros, en adición a la aplicación de excitaciones apropiadas al sistema. El método se compara con estimaciones de mínimos cuadrados y sus variantes: recursivo, generalizado factible y totales. El método propuesto es validado en simulación y en experimentos usando una minicargadora industrial Cat®262C. La masa es estimada con un error RMS bajo el 1% del total. Movimientos rotacionales y complejos también fueron probados para evaluar la factibilidad de obtener la inercia rotacional, centro de masa y parámetros de roce.