



 English
English

Académico de la Universidad de Illinois dicta charla de manejo de la incertidumbre en control, planificación y servoposicionamiento visual de robots
El profesor Seth Hutchinson visitó la Escuela de Ingeniería UC y realizó charlas sobre los avances en los métodos para que robots controlen y planifiquen sus trayectorias en forma automática...
Académico de la Universidad de Illinois dicta charla de manejo de la incertidumbre en control, planificación y servoposicionamiento visual de robots
El profesor Seth Hutchinson del Department of Electrical and Computer Engineering de la University of Illinois en Urbana-Champaign, realizó dos charlas en la Escuela de Ingeniería UC. La primera trató sobre los avances en los métodos para que robots controlen y planifiquen sus trayectorias en forma automática en situaciones con incertidumbre y la segunda profundizó en técnicas que utilizan información visual obtenida a través de cámaras para controlar y guiar robots.
El académico es reconocido a nivel mundial por sus aportes al desarrollo de algoritmos para motion path planning y visual servoing, es además miembro del laboratorio de investigación multidisciplinaria Coordinated Science Lab de la University of Illinois, laboratorio con una trayectoria de más de 60 años de invenciones en comunicaciones, giróscopos para submarinos, pantallas plasma planas, y primeros chips microprocesadores que dieron origen a los muti-core actuales, entre varias otros desarrollos.
Las charlas se enmarcaron en el proyecto Fondecyt titulado “Efficient maneuvering of automated agricultural vehicles with ground and environment restrictions”, liderado por los profesores Fernando Auat de la Universidad Técnica Federico Santa María y Miguel Torres de la Escuela de Ingeniería UC.
La actividad contó con la participación de alumnos, profesores e investigadores de la Escuela de Ingeniería UC y el Major de Sistemas Autónomos y Robóticos, así como también de la Universidad de los Andes, Universidad de Chile, y Universidad Técnica Federico Santa María.
Métodos para resolver desafíos
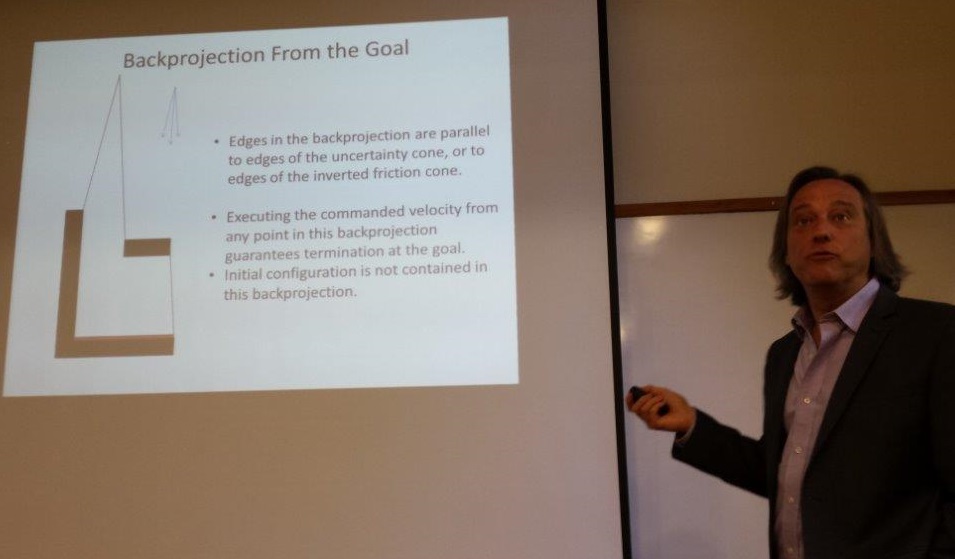 Durante la primera charla titulada “Managing Uncertainty in Robotics: From Control to Planning”, el académico recorrió una variedad de métodos, desde controladores robustos basados en sensores, pasando por estrategias de movimiento basada en teoría de juegos, hasta modelos generales basados en procesos de decisión Markovianos parcialmente observables o POMDPs (la sigla en inglés para partially observable Markov decision processes).
Durante la primera charla titulada “Managing Uncertainty in Robotics: From Control to Planning”, el académico recorrió una variedad de métodos, desde controladores robustos basados en sensores, pasando por estrategias de movimiento basada en teoría de juegos, hasta modelos generales basados en procesos de decisión Markovianos parcialmente observables o POMDPs (la sigla en inglés para partially observable Markov decision processes).
En la segunda charla, titulada “Visual Servo Control: The First Quarter Century”, el investigador presentó la evolución de los métodos de servoposicionamiento visual desde sus orígenes hace 25 años atrás, y algunos métodos para resolver los desafíos que imponen las singularidades que impiden invertir el modelo bajo ciertas condiciones. En el primer enfoque, el controlador es particionado en dos controladores separados, uno para la rotación entorno al eje óptico y otro para el movimiento en los grados de libertad de traslación y rotación remanentes empleando mediciones en el plano de la imagen, en vez de utilizar un controlador tradicional en el que todos los grados de libertad responden a la misma estrategia conjunta. En el segundo enfoque, se propone un controlador híbrido, en el que se conmuta entre un controlador basado en mediciones en el plano de la imagen 2D y un controlador basado en mediciones de posición en el mundo 3D, con un esquema de conmutación basado en información del estado del sistema.